這篇文章告訴您什么是工業機器人上下料應用
| 什么是工業機器人上下料應用 |
|
工業機器人上下料作站由上下料機器人、數控機床、PLC控制柜、輸送線、等組成。
 德航智能加固手持平板電腦、工業平板電腦、BOX機皆可應用在工業自動化生產場景中,可連接掃描槍、讀取實時數據等。 |
|
(1)上下料工業機器人
上下料工業機器人包含:工業機器人、控制柜、示教器、末端執行器。上下料工業機器人的選型一般根據自動生產線加工產品與設備布局來選用工業機器人及末端執行器。如數控機床加工的工件為圓柱體,重量≤1Kg,設備距離≤1300,故機床上下料機器人選用的是安川MH6機器人,機器人如圖所示。末端執行器采用氣動機械式二指單關節手爪夾持工件,控制手爪動作的電磁閥安裝在MH6機器人本體上。
 (2)數控機床
數控機床如圖所示。數控機床的任務是對工件進行加工,而工件的上下料則由工業機器人完成。
 (3)PLC控制系統 PLC控制柜用來安裝斷路器、PLC、開關電源、中間繼電器、變壓器等元件器。PLC為OMRON公 司NJ301-1100控制器,上下料機器人的啟動與停止、輸送線的運行等,均由其控制。
(4)上下料輸送線
上下料輸送線的功能是將載有待加工工件的托盤輸送到上料工位,機器人將工件搬運至CNC機床進 行加工,再將加工完成的工件搬運到托盤上,由輸送線將加工完成的工件輸送到裝配工作站進行裝 配。上下料輸送線如圖所示。
 上下料輸送線由工件上下料輸送線1、工件上下料輸送線2、工件上下料輸送線3等3節輸送線組成。
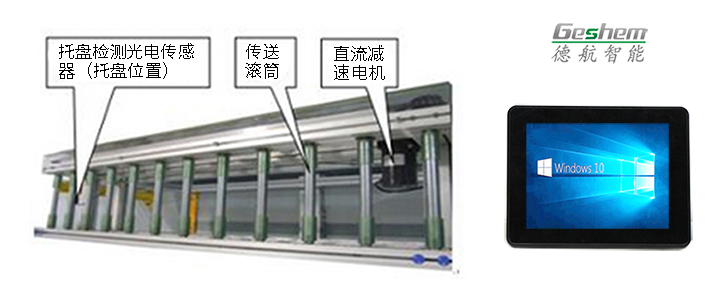
a)工件上下料輸送線1 工件上下料輸送線1如圖所示。由直流減速電機、傳動機構、傳送滾筒、托盤檢測光電傳感等組成。
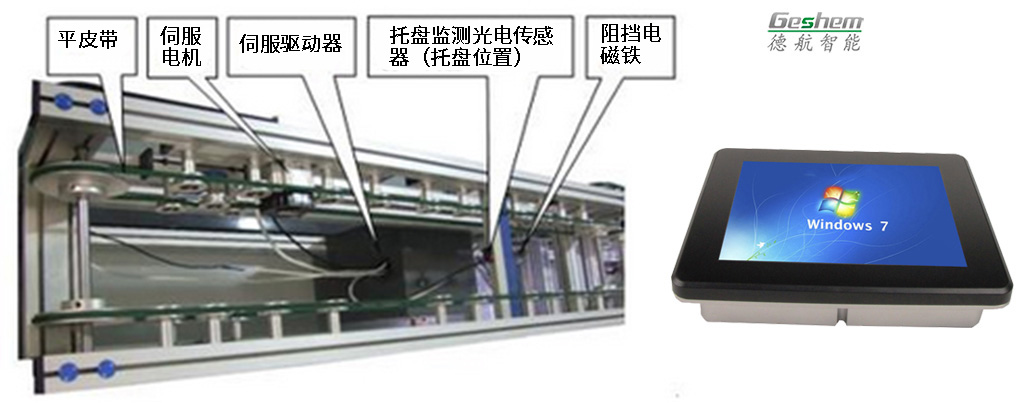
 b) 工件上下料輸送線2工件上下料輸送線2如圖所示。由伺服電機、伺服驅動器、傳動機構、平皮帶、托盤檢測光電傳感器、阻擋電磁鐵等組成。
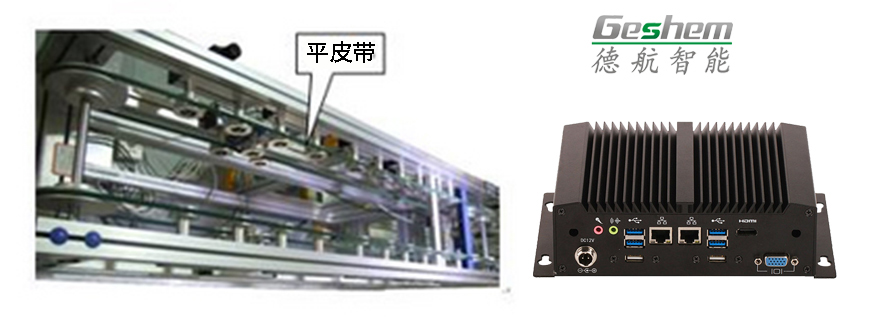
 c) 工件上下料輸送線3 工件上下料輸送線3如圖所示。由傳動機構、平皮帶等組成,工件上料輸送線3與工件上料輸送線2通過皮帶輪連接,由同一臺伺服電機拖動。
 2.工業機器人上下料工作流程
(1) 當載有待加工工件的托盤輸送到上料位置后,機器人將工件搬運到數控機床的加工臺上。
(2) 數控機床進行加工。
(3) 加工完成,機器人將工件搬運到輸送線上料位置的托盤上。
(4) 上料輸送線將載有已加工工件的托盤向裝配工作站輸送。
當空托盤放置在輸送線的起始位置(托盤位置1)時,托盤檢測光電傳感器檢測到托盤,啟動直流減速電機和伺服電機,3節輸送線同時運行,將托盤向工件上料位置“托盤位置2”處輸送。
當空托盤達到上料位置(托盤位置2)時,被阻擋電磁鐵擋住,同時托盤檢測光電傳感器檢測到托盤,直流電機與伺服電機停止。等待機器人將工件搬運至CNC機床進行加工,再將加工完成的工件搬運到托盤上。
當機器人將工件搬運到托盤上后,電磁鐵得電,擋鐵縮回,伺服電機啟動,工件上下料輸送線2和工件上下料輸送線3運行,將裝有工件的托盤向裝配工作站輸送。
|




